Optimalizácia výkonu pomocou MPU-6050: Nastavenie, kalibrácia a aplikácie
2024-04-25
9210
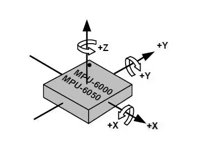
MPU-6050 je prvý integrovaný 6-osový komponent pohybu pohybu, ktorý integruje 3-osový gyroskop, 3-os akcelerometra a škálovateľný procesor digitálneho pohybu (DMP).Účelom jeho použitia je získať meraný uhol sklonu objektu (ako je kvadrokoptéra, vyrovnávacie auto) na osi X, Y a Z, to znamená uhol ihriska, uhol valca a uhol vybočenia.Čítame šesť údajov MPU-6050 (trojosová hodnota zrýchlenia AD a trojosová hodnota uhlovej rýchlosti AD) prostredníctvom rozhrania I2C.Po spracovaní fúzie držania tela je možné vypočítať uhly tónu, rolu a výpadku.Ako smerová referencia pre hodnoty merania je definícia smeru súradnice senzora znázornená na obrázku nižšie, ktorý sleduje princíp pravostranného súradnicového systému (to znamená, že pravý palec poukazuje na pozitívny smer x-Ax, ukazovák ukazuje na pozitívny smer osi a stredný prst ukazuje na kladný smer osi Z).
Katalóg
Vďaka svojej vyhradenej zbernici snímača I2C je MPU-6050 schopný prijímať vstup priamo z externého 3-osového kompasu, ktorý poskytuje úplný výstup 9-osi Motionfusion ™.Eliminuje problém nezrovnalostí medzi kombinovaným časovým zariadením gyroskopu a urýchľovača a významne znižuje obalový priestor v porovnaní s viaczložkovými roztokmi.Keď je pripojený k trojosnému magnetometre, MPU-60X0 je schopný poskytnúť úplný 9-osový pohybový výstup na svoj hlavný port I2C alebo SPI (všimnite si, že port SPI je k dispozícii iba na MPU-6000).
Alternatívy a ekvivalenty
- MPU-3300
- MPU-6000
- MPU-6500
Výrobca MPU-6050
Výrobca MPU-6050 je TDK.Po dvom zakladateľom TDK, Dr. Yogoro Kato a Takei Takei, vynašli ferity v Tokiu, založili Tokio Denkikagaku Kogyo K.K.v roku 1935. Ako globálna značka elektronického priemyslu si TDK vždy udržala dominantnú pozíciu v oblasti elektronických surovín a elektronických komponentov.Komplexné a komplexné produktové portfólio spoločnosti TDK pokrývajú pasívne komponenty, ako sú keramické kondenzátory, hliníkové elektrolytické kondenzátory, kondenzátory filmov, magnetické výrobky, vysokofrekvenčné komponenty, piezoelektrické a ochranné zariadenia, ako aj senzory a senzory (ako je teplota a tlak,Magnetické a MEMS senzory) atď. Okrem toho TDK poskytuje napájacie zdroje a energetické zariadenia, magnetické hlavy a ďalšie výrobky.Medzi značky produktov patria TDK, EPCOS, Invensense, Micronas, Tronics a TDK-Lambda.
Interný blokový diagram MPU-6050
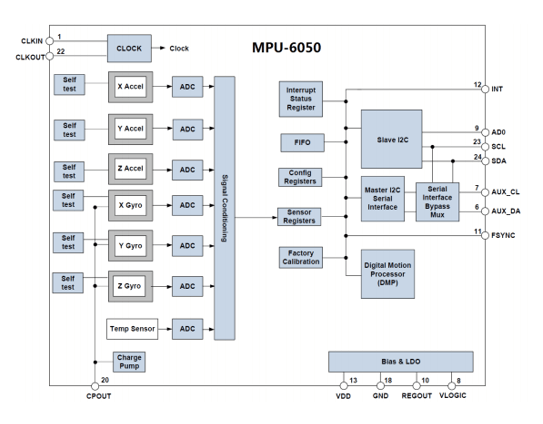
Medzi nimi sú SCL a SDA IIC rozhrania pripojené k MCU a MCU riadi MPU-6050 prostredníctvom tohto rozhrania IIC.K dispozícii je tiež rozhranie IIC, konkrétne aux_cl a aux_da.Toto rozhranie sa dá použiť na pripojenie externých slave zariadení, ako sú magnetické senzory, na vytvorenie deväťosového senzora.Vlogic je napätie portu IO.Tento kolík môže podporovať minimálne 1,8 V.Zvyčajne ho pripojíme priamo k VDD.AD0 je riadiaci kolík adresy slave IIC rozhrania (pripojený k MCU).Tento kolík riadi najnižší kúsok adresy IIC.Ak je pripojená k GND, IIC adresa MPU-6050 je 0x68;Ak je pripojený k VDD, je to 0x69.Upozorňujeme, že adresa tu nezahŕňa najnižší kúsok prenosu údajov (najnižší bit sa používa na reprezentáciu operácií čítania a zápisu).Na MWBALANDSTC15 je AD0 pripojený k GND, takže IIC adresa MPU-6050 je 0x68 (s výnimkou najnižšieho bitu).
Inicializujte rozhranie IIC
MPU-6050 používa IIC na komunikáciu s STC15, takže musíme najskôr inicializovať dátové riadky SDA a SCL pripojené k MPU-6050.
Reset MPU-6050
Tento krok obnovuje všetky registre vo vnútri MPU-6050 na ich predvolené hodnoty, ktoré sa dosiahne písaním 1 až BIT7 registra správy napájania 1 (0x6b).Po resetovaní sa register správy napájania 1 obnoví na predvolenú hodnotu (0x40) a tento register musí byť následne nastavený na 0x00, aby sa prebudil MPU-6050 a vložil ho do normálneho pracovného stavu.
Nastavte rozsah plného rozsahu snímača uhlovej rýchlosti (Gyro) a zrýchľovacieho snímača
V tomto kroku sme nastavili rozsah úplného rozsahu (FSR) dvoch senzorov prostredníctvom konfiguračného registra gyroskopu (0x1b) a konfigurácie snímača zrýchlenia (0x1c).Zvyčajne sme nastavili rozsah gyroskopu v plnom rozsahu na ± 2000 dps a rozsah akcelerometra v plnom rozsahu na ± 2G.
Nastavte ďalšie parametre
Tu musíme tiež nakonfigurovať nasledujúce parametre: vypnúť prerušenia, vypnúť rozhranie AUX I2C, zakázať FIFO, nastaviť rýchlosť vzorkovania gyroskopu a nakonfigurovať digitálny dolnopriepustný filter (DLPF).Pretože na čítanie údajov v tejto kapitole nepoužívame prerušenia, je potrebné vypnúť funkciu prerušenia.Zároveň, keďže na pripojenie ďalších externých senzorov nepoužívame rozhranie AUX I2C, musíme toto rozhranie zatvoriť.Tieto funkcie sa dajú riadiť prostredníctvom registra prerušenia Enable (0x38) a registra ovládania používateľov (0x6a).MPU-6050 môže použiť FIFO na ukladanie údajov o senzoroch, ale v tejto kapitole sme ich nepoužili, takže všetky kanály FIFO je potrebné uzavrieť.Toto je možné kontrolovať registrom FIFO Povolenie (0x23).V predvolenom nastavení je hodnota tohto registra 0 (tj FIFO je zakázaná), takže môžeme použiť predvolenú hodnotu priamo.Rýchlosť vzorkovania gyroskopu je riadená registrom deliča vzorkovania (0x19).Normálne sme nastavili túto vzorkovaciu rýchlosť na 50. Konfigurácia digitálneho nízko-priechodového filtra (DLPF) je dokončená prostredníctvom konfiguračného registra (0x1a).Všeobecne povedané, nastavíme DLPF na polovicu šírky pásma, aby sme vyvážili presnosť údajov a rýchlosť odozvy.
Nakonfigurujte zdroj systémových hodín a umožnite snímač uhlovej rýchlosti a snímač zrýchlenia
Nastavenie zdroja systémových hodín závisí od registra riadenia napájania 1 (0x6b), kde najnižšie tri bity tohto registra určujú výber zdroja hodín.V predvolenom nastavení sú tieto tri bity nastavené na 0, čo znamená, že systém používa ako zdroj hodín interný oscilátor RC 8MHz RC.Aby sme však zlepšili presnosť hodín, často ju nastavíme na 1 a vyberieme Gyroscope PLL osi X ako zdroj hodín.Okrem toho je dôležitým krokom v procese inicializácie aj umožnenie snímača uhlovej rýchlosti a snímača zrýchlenia.Obe operácie sa implementujú prostredníctvom registra riadenia výkonu 2 (0x6c).Jednoducho nastavte zodpovedajúci bit na 0, aby ste aktivovali zodpovedajúci senzor.Po dokončení vyššie uvedených krokov môže MPU-6050 zadať normálny pracovný stav.Tieto registre, ktoré nie sú špeciálne nastavené, prijmú predvolené hodnoty vopred v súlade s systémom.
Ako funguje MPU-6050?
Gyro senzor
Senzor je vybavený gyrom vo vnútri, ktorý zostane vždy rovnobežný s počiatočným smerom v dôsledku gyroskopického účinku.Preto môžeme vypočítať smer a uhol rotácie zistením odchýlky gyra z počiatočného smeru.
Snímač akcelerometra
Senzor akcelerometra je zariadenie, ktoré dokáže merať zrýchlenie a funguje na základe princípu piezoelektrického efektu.Počas zrýchlenia senzor meria zotrvačnú silu aplikovanú na hmotnostný blok a potom vypočíta hodnotu zrýchlenia pomocou Newtonovho druhého zákona.
Procesor digitálneho pohybu (DMP)
DMP je modul spracovania údajov v čipe MPU6050, ktorý má vstavaný algoritmus filtrovania Kalmana na získanie údajov zo senzorov gyroskopu a akcelerometra a spracovanie výstupných kvartárov.Táto funkcia výrazne znižuje pracovné zaťaženie periférneho mikroprocesora a vyhýba sa zdĺhavému procesu filtrovania a fúzie údajov.
Poznámky:
Kvarternióny: Kvarióny sú jednoduché superkomplexové čísla.Komplexné čísla sa skladajú zo skutočných čísel plus imaginárna jednotka I, kde i^2 = -1.
Kde sa používa MPU-6050?
- hračky
- Skupina a prenosné hry
- Herné ovládače založené na pohybe
- Technológia Blurfree ™ (pre stabilizáciu obrazu videa/stále)
- Technológia AirSign ™ (pre bezpečnosť/autentifikáciu)
- InstantGesture ™ IG ™ rozpoznávanie gesta
- Nositeľné senzory pre zdravie, fitnes a šport
- Hra a aplikačný rámec s podporou pohybu
- Technológia MotionCommand ™ (pre gesto krátke výpadky)
- Služby založené na polohe, body záujmu a mŕtve počítanie
- 3D diaľkové ovládacie prvky pre internetové pripojené DTV a nastavené horné políčka, 3D myši
- Technológia TouchAnywhere ™ (pre ovládacie prvky aplikácie/navigácia UI „No Touch“)
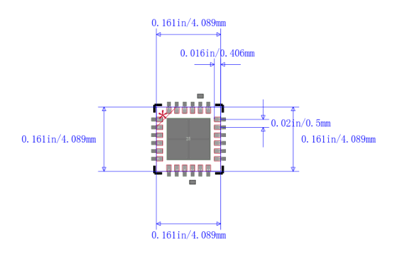
Balíček MPU-6050
Ako znížiť hluk MPU-6050?
Môžeme vziať nasledujúce spôsoby, ako znížiť hluk MPU-6050.
Použite kalibrované senzory
Kalibrácia akcelerometra a gyroskopu MPU-6050 môže eliminovať zaujatosť a chybu samotných senzorov, čím sa zníži účinok hluku.Kalibračný proces zvyčajne pozostáva z dvoch štádií: statická kalibrácia a kalibrácia pohybu.
Proces hardvéru filtrovania
Pridanie filtračných kondenzátorov do elektrického vedenia MPU-6050 môže znížiť vplyv hluku napájania na snímač.Medzitým by sme sa počas rozloženia PCB mali pokúsiť udržať MPU-6050 mimo potenciálnych zdrojov rušenia, ako sú vysokofrekvenčné signálne vedenia a vysoké výkony.
Spracovanie softvérového filtrovania
Po zhromaždení nespracovaných údajov z MPU-6050 môžeme pridať odkaz na filtrovanie softvéru na predbežné spracovanie počiatočných údajov, aby sa eliminovala interferencia vyvolaná šumom.Bežne používané metódy filtrovania softvéru zahŕňajú priemerné filtrovanie, stredné filtrovanie, filtrovanie Kalmana atď.
Použite interný filter s nízkym priechodom
MPU-6050 má interný integrovaný digitálny dolnopriepustný filter, ktorý sa môže použiť na zníženie vysokofrekvenčného šumu nastavením jeho medznej frekvencie.Konkrétne môžeme nastaviť medznú frekvenciu digitálneho filtra úpravou konfiguračného registra MPU-6050, aby sme eliminovali vysokofrekvenčný šum spôsobený vzorkovaním A/D.
Výpočet trajektórie pohybu MPU-6050
MPU-6050 je šesťosový akcelerometer a senzor gyroskopu, ktorý sa môže použiť na meranie pohybu a postoja objektov.Výpočet trajektórie pohybu založený na MPU-6050 je možné realizovať podľa nasledujúcich krokov:
Prvým krokom je prečítanie údajov senzora.Potrebujeme prečítať údaje akcelerometra a gyroskopu zo senzorov MPU-6050 pomocou vhodných ovládačov a knižničných funkcií.Tieto údaje sú zvyčajne výstupné v digitálnom formáte, takže na ich premenu na skutočné merania vo fyzických jednotkách sú potrebné niektoré konverzie a kalibračné práce.
Druhým krokom je výpočet zrýchlenia.Najprv musíme spracovať údaje z akcelerometra, aby sme odvodili zrýchlenie objektu v každej osi.Následne, aby sme vypočítali rýchlosť a posunutie objektu v každej osi, musíme integrovať údaje o zrýchlení.V tomto procese sa často používajú numerické techniky integrácie, ako napríklad Eulerove metóda alebo metóda Lunger-Kutta na zabezpečenie presnosti výpočtov posunu.
Tretím krokom je výpočet uhlovej rýchlosti.Pomocou údajov gyroskopu je možné vypočítať uhlovú rýchlosť objektu v každej osi.Tieto údaje musia byť opäť kalibrované a prevedené, aby sa získala uhlová rýchlosť v skutočných fyzických jednotkách.
Štvrtým krokom je výpočet rotácie.Integráciou údajov o uhlovej rýchlosti sa môže vypočítať uhol rotácie objektu v každej osi.To sa dá dosiahnuť pomocou numerických integračných techník, ako je Eulerova metóda alebo metóda Longe-Kutta na výpočet uhla.
Piatym krokom je zlúčenie údajov.Kombinujeme údaje z akcelerometre a gyroskopov, aby sme získali úplné informácie o postoji a pozícii objektu.To sa dá dosiahnuť pomocou algoritmov, ako je riešiteľ postoja založený na kvartári alebo riešiteľ Eulera.
Šiesty krokom je vizualizovať výsledky.Prevedieme vypočítanú trajektóriu pohybu objektu na sadu bodov v 3D súradnicovom systéme a zobrazujeme ju pomocou vhodných vizualizačných nástrojov pre intuitívnejšie pochopenie zmeny trajektórie pohybu a postoja objektu.
Často kladené otázky [FAQ]
1. Aký presný je MPU6050?
Získané výsledky ukázali dostatočnú presnosť menej ako 1 % a spoľahlivosť, pričom sa zabezpečilo správne rozmery hriadeľa výťahu a vysoké štandardy vlečného priemyslu.
2. Ako čítať údaje z MPU6050?
Ak si chcete prečítať interné registre MPU6050, Master odošle podmienku štartu, po ktorej nasleduje adresa slave I2C a zápisný bit, a potom adresa registra, ktorá sa bude čítať.
3. Kde sa používa MPU6050?
V nositeľných zariadeniach na sledovanie zdravia, zariadenia na sledovanie fitness.U robotov a kvadrokoptérov sa MPU6050 používa na kontrolu polohy.Používa sa pri kontrole robotického ramena.Zariadenia na riadenie gesta rúk.
4. Je MPU6050 IMU?
Blok snímača MPU6050 IMU číta údaje zo senzora MPU-6050, ktorý je pripojený k hardvéru.Blok výstupuje zrýchlenie, uhlová rýchlosť a teplota pozdĺž osí senzora.
5. Aké je spracovanie MPU6050?
Toto je palubný procesor MPU6050, ktorý kombinuje údaje pochádzajúce z akcelerometra a gyroskopu.DMP je kľúčom k použitiu MPU6050 a je podrobne vysvetlený neskôr.Rovnako ako u všetkých mikroprocesorov potrebuje DMP firmvér, aby mohol spustiť.
Test funkcie.Najvyššie nákladovo efektívne výrobky a najlepšie služby sú náš večný záväzok.
Horúci článok
- Sú CR2032 a CR2016 vymeniteľné
- MOSFET: Definícia, pracovný princíp a výber
- Inštalácia a testovanie relé, interpretácia diagramov zapojenia relé
- CR2016 vs. CR2032 Aký je rozdiel
- NPN vs. PNP: Aký je rozdiel?
- ESP32 vs STM32: Ktorý mikrokontrolér je pre vás lepší?
- LM358 Duálny operačný zosilňovač Komplexný sprievodca: Pinouts, diagramy obvodu, ekvivalenty, užitočné príklady
- CR2032 vs DL2032 vs CR2025 Porovnávací sprievodca
- Pochopenie rozdielov ESP32 a ESP32-S3 Analýza a analýza výkonnosti
- Podrobná analýza obvodu série RC
 Preskúmanie schopností a aplikácií komunikačného čipu NRF24L01
Preskúmanie schopností a aplikácií komunikačného čipu NRF24L01
2024-04-25
 MMBT3904 NPN tranzistor: jeho špecifikácie, komplexný sprievodca aplikáciou a MMBT3904 vs. MMBT5551
MMBT3904 NPN tranzistor: jeho špecifikácie, komplexný sprievodca aplikáciou a MMBT3904 vs. MMBT5551
2024-04-25
Horúce číslo dielu
 C0402C0G1C1R5C020BC
C0402C0G1C1R5C020BC- C0402X6S0G681K020BC
 GRM0225C1E1R6CA03L
GRM0225C1E1R6CA03L GRM1555C2A8R0CA01J
GRM1555C2A8R0CA01J UMK105CG121KW-F
UMK105CG121KW-F IRF630PBF
IRF630PBF MCP79412-I/SN
MCP79412-I/SN VP5-1200-R
VP5-1200-R MK40DX256ZVMD10
MK40DX256ZVMD10 MAX901BCSE+T
MAX901BCSE+T
- IS43R16160B-5TLI
- SC2442ITSTRT
- UPD78F9212MA-FAA-AX
- PAF500F24-28
- V24C28H100B3
- RT0805BRD0721KL
- CM600DXL-24A
- STWD100YNXWY3F
- T491D106K025ZT7280
- T491T226K006ZT7280
- TLV320AIC23BGQE
- LTC4449EDCB#TRPBF
- TL3474IDR
- T491B226M006ATAU01
- T491D106K050AT2478
- AD536ASD/883B
- LM75BIMM-3/NOPB
- ADUM1285ARZ
- XC7A35T-2CSG324C
- ADM6996F
- CYNSE70129D-167BGC
- JS28F640J3C-115
- LM9833CCVS-F
- MAX3226ECUE
- MC145483DTR2
- PRC202500K/181M
- S71WS256NC0BFWA7
- SSTUB32864EC/G
- THS4211DRCR
- XCV400E-6BG432I
- 9LPRS475BGLF
- LB8650T-TLM
- TCE1529509D
- VP40581B
- A6277ELWT
- RTL8671B-VE-GR
- HD6413003RF16V
- LT8316EFE#TRPBF
- 3SB3201-4AD11